UDS Overview
UDS is the diagnostics language all ECU's speak nowadays, linked to the Autosar DCM module. Learn its basic services here
I'm guessing you heard about UDS (Unified Diagnostic Services) at least some time in your life, or, at least, OBD2 (On-Board Diagnostics 2). If these terms sound familiar to you, you're already on the right path to knowing what vehice diagnostics are and the way they are performed.
UDS (Unified Diagnostic Services) is a widely used protocol in production vehicles, for diagnostics. The protocol (ISO 14229) has been around for ages, and it's hard to find a vehicle that does not implement this communication layer. According to the OSI layer, UDS sits between the session and application layers. The remaining layers are handled via the ECU's communication stack, which is likely CAN. It's a client-server protocol, where the ECU is the server, and the client is a testing tool, which can be an OBD2 connector from Amazon.
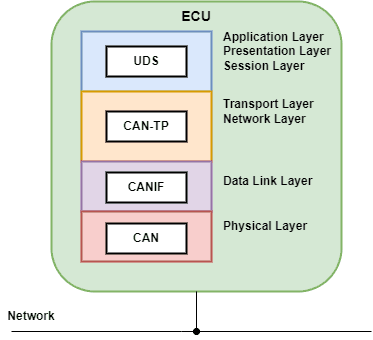
UDS and the OSI Model, configured via CAN in this example
When your mechanic mentions it connected your vehicle to a computer, he's saying that used the OBD2 port on your vehicle to connect via UDS with some program he overpaid for to get the diagnostics your vehicle picked up along the way. So, you can already decipher the first advantage of UDS: it makes diagnosis of problems easier. But does it stop there? No, not really, and it can also be useful during development. Let's see some of the main advantages of UDS:
-
Error diagnosis - UDS is just a protocol, but when combined with different diagnostic modules in Autosar (such as the ones we overviewed on the recent article What are DEM, DLT, DCM and DET (opens in a new tab)), the ECU network of your vehicle can inform you of all problems, through the fault memory on the ECU's (which store the errors detected while driving).
-
ECU Reprogramming - During development, you can use Xcp for reprogramming purposes (more on Xcp soon, but if you want, you can dive into the calibration world, in The Basics of A2L Files (opens in a new tab) and Calibration Overview (opens in a new tab)), but it's not your only option, and you cannot use it in production, making it a lesser choice than reprogramming via UDS.
Now, these are the two main reasons UDS is used, but there is more you can do with it. A better way to better understand UDS is by learning about the services it provides. A side-note, all SID requests are responded with 0x40 + request SID, unless an error occurs. And, the OEM's can complete the command responses with their own reserved values, so it's not limited to what we're mentioning here.
Diagnostic / communication management:
| Service Name | SID | Description |
|---|---|---|
| Diagnostic Session Control | 0x10 | Switch between operating sessions. These sessions provide access to a subset of commands. There can be OEM-specific sessions, but the most common are: default session (enabled from reset), extended session (allows an extra set of diagnostic functions), programming session (used for ECU reprogramming) and safety system diagnostic session (used for safety-cricical diagnostics). The session is restored in case of a timeout. To avoid it, read the Tester Present service |
| ECU Reset | 0x11 | Resets the ECU. Some of the reset types are: hard reset (emulates a shutdown of the power supply) and soft reset |
| Security Access | 0x27 | Allow access to security-relevant services |
| Communication Control | 0x28 | Control the sending and reception of messages to and from the ECU |
| Authentication | 0x29 | Used for the same purpose as the Security Access service, but for modern security athentication methods. Exists since 2020 |
| Tester Present | 0x3E | Ping the ECU in order to keep the current session active |
| Access Timing Parameters | 0x83 | Change the connection timing parameters between the ECU and the client, in order to avoid timeouts while communicating |
| Secure Data Transmission | 0x84 | Used to transmit data in a secure mode, adding chryptographic protection |
| Control DTC Setting | 0x85 | Control DTC detection for specific or all errors. Useful when anomalous behaviors are triggered (for example, by maintenance work on a vehicle) |
| Response On Event | 0x86 | Configure a specific diagnostic service to get triggered in response to an event on the server |
| Link Control | 0x87 | Set the baud rate for diagnostic access. Usually available only on the gateway ECU |
Data Transmission:
| Service Name | SID | Description |
|---|---|---|
| Read Data by Identifier | 0x22 | Retrieve values from the ECU. Usually, many values are available for the user, and most of them are OEM-specific. Of course, some are obvious, such as the software version or part number |
| Read Memory by Address | 0x23 | Read memory from an address (if it's made available by the ECU, there are rules to this). Sort-of works as an upload command in calibration |
| Read Scaling Data by Identifier | 0x24 | Read scaling data of a specific DID |
| Read Data by Identifier Periodic | 0x2A | Retrieve values from an ECU at a periodid pace |
| Dynamically Define Data Identifier | 0x2C | Define a DID to send a set of DID's |
| Write Data by Data Identifier | 0x2E | Write a value to a DID |
| Write Memory by Address | 0x3D | Write to one or a set of contiguous addresses |
Stored Data Transmission:
| Service Name | SID | Description |
|---|---|---|
| Clear Diagnostic Information | 0x14 | Delete all stored DTC's (Diagnostic Trouble Codes) |
| Read DTC Information | 0x19 | Read a DTC state. Additional information can also be read |
IO Control:
| Service Name | SID | Description |
|---|---|---|
| IO Control by Identifier | 0x2F | Control a signal in the ECU |
Routine Activation:
| Service Name | SID | Description |
|---|---|---|
| Routine Control | 0x31 | Trigger a function on the ECU. There are 3 different options: start (to start execution), stop (to interrupt the service) and to retrieve the results of the service |
Upload and Download:
| Service Name | SID | Description |
|---|---|---|
| Request Downlaod | 0x34 | Write data into the ECU, by specifying address and length |
| Request Upload | 0x35 | Read data from the ECU, just as the Request Download service |
| Transfer Data | 0x36 | Used to write or read data. The direction is specified via the two former commands (Request Download and Request Upload). As opposed to the former, it can send multiple commands, in case the data is too large to fit in a single packet, where the former are limited to the ECU-configured packet length |
| Request Transfer Exit | 0x37 | Used to signal completion of the data transferred. The service can be rejected in case the specified length in Treansfer Data is not reached |
| Request FIle Transfer | 0x38 | Download/upload a file from/to the client to/from the server |
After all of these services, there is also one message sent via the ECU to your client. You'll see it often, the Negative Response, which has the code 0x7F and signals the service requested could not be performed. There is also a NRC (Negative Response Code) included, giving you a clue on what went wrong.
Before we end this article, I would like to give you a picture on how UDS maps to the Autosar layered architecture. The UDS protocol lies within the DCM (Diagnostic Communication Manager) module, and you can configure all its services there. There is also the option to interface with other modules, most notably DEM (Diagnostic Event Manager), where the DTC's are configured and set. The lower layers are pretty obvious, are the COM-stack you are using (the most common is CAN, an CAN-TP can be used to enhance the size of the PDU's that can be exchanged). Other modules, such as the BSWM (BSW Mode Manager) can be used to provide functionalities, such as the communication control.
As some bottom notes, I would like to mention you don't need to know all these services by heart. You'll deal with them via an external tool. Of course, you'll get the hang of it when you need to put your hands on it. One good exercise is to buy one of those OBD2 connectors, an see how far you can go. Of course, at your own risk!
Author: Micael Coutinho (opens in a new tab)
References:
- ISO 14229 - Unified diagnostic services (UDS) (opens in a new tab)
- Specification of Diagnostic Communication Manager - Autosar Specification (opens in a new tab)
More from the author
© AutosarToday —@LinkedIn